公開日: 2025年3月25日
読了時間: 約8分
カテゴリ: やさしい技術解説
タグ: 音響測深、初心者向け
はじめに
海や湖の深さはどうやって測っているのでしょうか? 実は**「音」**を使えば、目に見えない水中でも正確に距離を測ることができます。本記事では、専門知識がなくても理解できるように、音響測深の基本を物理からやさしく解説します。
1. 音の速さは水の中で変わる
空気中と水中で音の速さが違う?
私たちが普段耳にする音は、空気中を秒速約340メートルで進みます。新幹線の最高速度が時速300km(秒速約83m)ですから、音はその約4倍の速さです。
ところが、水の中に入ると音の速さは一気に跳ね上がり、秒速約1,500メートルにもなります。空気中の約4.4倍です。水は空気よりもずっと密度が高いため、音のエネルギーが効率よく伝わるのです。
| 媒質 | 音速 | 身近なたとえ |
|---|---|---|
| 空気中 | 約340 m/s | 新幹線の約4倍 |
| 水中 | 約1,500 m/s | ジェット旅客機と同じくらい |
でも、水中の音速は「一定」ではない
ここが重要なポイントです。水中の音速は常に1,500m/sというわけではありません。水温・塩分濃度・水圧(深さ)の3つの要因によって変化します。

水温・塩分・水圧が音速に与える影響:
- 水温(温度)
- 高い → 音速UP
- 低い → 音速DOWN
- 10℃差で約40m/s変化
- 塩分濃度(塩分)
- 高い → 音速UP
- 低い → 音速DOWN
- 海水 > 淡水
- 水圧(深さ)
- 深い → 音速UP
- 浅い → 音速DOWN
- 深層ほど高圧
たとえば、水温が10℃変わるだけで音速は約40m/sも変化します。これは測定結果に大きな誤差を生む原因になるため、実際の調査では必ず補正を行います(詳しくは第4章で解説します)。
身近なたとえで理解する
お風呂のお湯の中で手を叩くと、水温が高いほど音がよく響くのをイメージしてください。温かい水ほど音が速く伝わるのは、分子の動きが活発になるためです。海では深さや場所によって水温が異なるので、音の速さも場所ごとに変わります。
2. 往復時間から水深を計算する
「やまびこ」と同じ原理
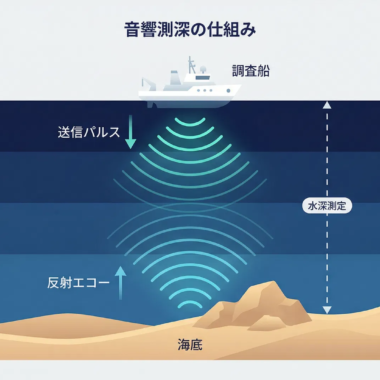
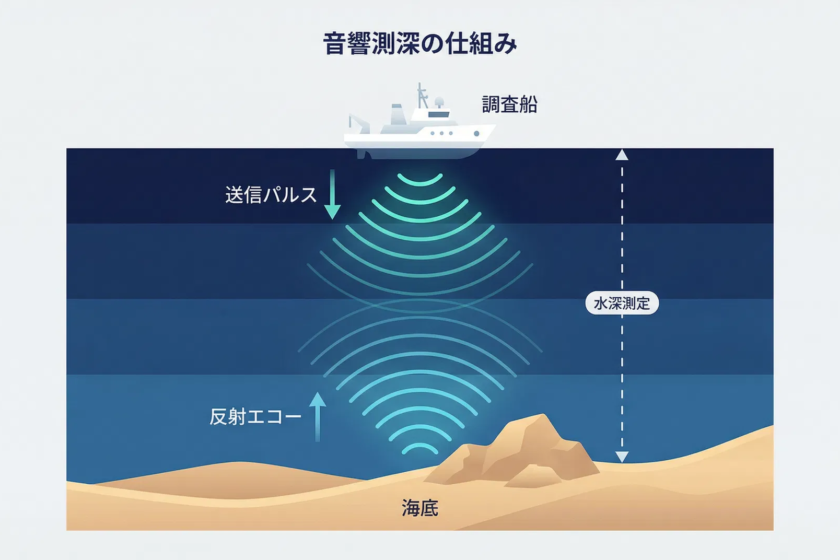
山に向かって「ヤッホー!」と叫ぶと、数秒後に声が返ってきます。これは音が山にぶつかって跳ね返ってくる現象(反射)です。音響測深はまさにこの**「やまびこ」と同じ原理**を水中で使っています。
船の底から海底に向けて音波(パルス)を発射し、海底で反射して戻ってくるまでの時間を精密に計測します。音の速さがわかっていれば、時間から距離を計算できます。

計算式はとてもシンプル
水深の計算式:
d = v × t ÷ 2
各変数の説明:
- d = 水深(m)
- v = 音速(m/s)
- t = 往復時間(秒)
ポイントは**「÷2」**の部分です。音は船から海底まで行って、さらに戻ってくるので、計測した時間は往復分です。片道の距離(=水深)を求めるには、2で割る必要があります。
計算してみよう
音速を1,500m/s、音が2秒後に戻ってきた場合:
d = 1,500 × 2 ÷ 2 = 1,500m
つまり水深は1,500メートル。たった2秒の計測で、深海の深さがわかるのです。
3. 扇状ビームで海底を3Dに
1本の音波では「点」しかわからない
ここまで説明した方法は「シングルビーム測深」と呼ばれ、船の真下の1点の深さだけを測ります。しかし、海底の地形を知るには、広い範囲のデータが必要です。
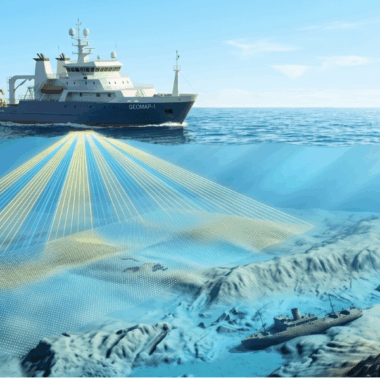
そこで登場するのがマルチビーム測深機です。これは扇(おうぎ)のように複数の音波を同時に発射し、それぞれの反射時間を一度に測る装置です。1回の発射で数百本ものビームを出すことができ、船が進むにつれて帯状に海底地形を取得していきます。

「角度」と「距離」で位置を特定
マルチビームでは、各ビームの発射角度と**反射までの時間(距離)を組み合わせて、海底の各点の位置を計算します。さらに、GPSで船の位置を正確に把握しているため、すべての点を3次元座標(X:経度、Y:緯度、Z:深さ)**として記録できます。
3次元データに必要な3つの情報
- 距離:音速 × 時間で求めた各ビームの反射距離
- 発射角度:各ビームが船からどの方向に出たか
- 船の位置:GPSによる高精度な緯度・経度情報
こうして得られた大量の点データを処理すると、海底の地形がまるで地図のように立体的に再現されます。近年の技術では、海底の小さな岩や人工物まで識別できるほど高精細なデータが取得可能です。
4. 正確に測るための補正技術
計算式はシンプルですが、実際の海では「理論どおり」にはいきません。正確なデータを得るためには、いくつかの補正処理が欠かせません。ここでは代表的な2つの補正を紹介します。
水温補正:音速の変化を修正する
第1章で説明したとおり、音速は水温によって変わります。特に問題になるのは、海の表面と深い場所で水温が大きく異なるケースです。水温が異なると音速も変わり、音波が真っ直ぐ進まずに曲がってしまう(屈折)ことがあります。
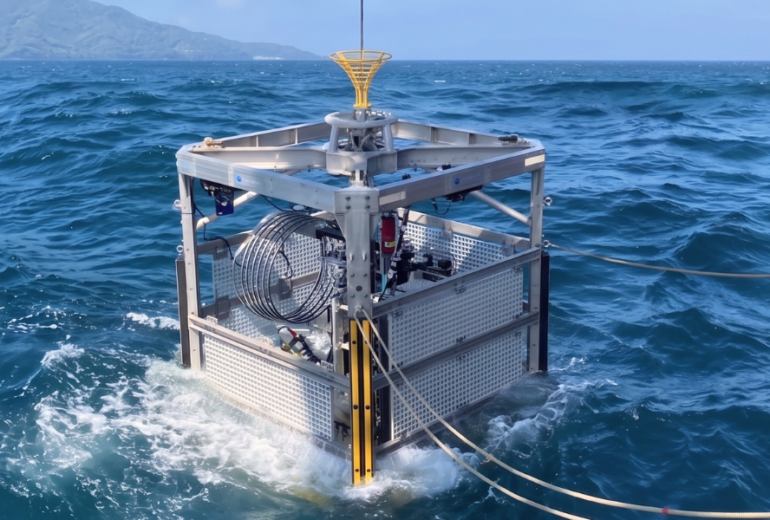
これを補正するために、現場ではCTDセンサー(水温・塩分・深度を同時に測定する装置)を使って、水中の音速プロファイル(深さごとの音速分布)を取得します。このデータを使って、音波の曲がりを計算に反映させるのです。
CTDセンサーとは?
CTDは「Conductivity(電気伝導度)・Temperature(水温)・Depth(深度)」の頭文字です。海中に降ろして使う計測器で、深さごとの水温と塩分濃度を連続的に記録します。このデータから正確な音速を計算し、測深結果を補正します。
潮汐補正:海面の高さの変化を修正する
もう一つの重要な補正が潮汐(ちょうせき)補正です。海面の高さは、潮の満ち引きによって常に変化しています。満潮時に測った水深と干潮時に測った水深では、同じ場所でも値が異なってしまいます。
潮汐補正のイメージ:
- 満潮時:水面が高い → 計測値が大きくなる(例:16m)
- 干潮時:水面が低い → 計測値が小さくなる(例:13m)
- 同じ場所でも潮位で水深が変わる → 補正が必須!
この問題を解決するために、以下のような方法で補正を行います:
潮汐補正の方法
- 潮位観測データの利用:近くの検潮所(潮位を観測する施設)のデータを使って、測定時の海面高さを補正
- 衛星測位による補正:GPS等の衛星測位で船の高さを直接測定し、海面変動の影響を除去
日本では海上保安庁の潮位データが広く利用されており、全国各地の検潮所から得られるリアルタイムデータが、正確な海底地形図の作成を支えています。
5. まとめ
音響測深は、**「音の速さ × 時間」**というシンプルな原理から始まりながらも、実際には環境補正や高度なデータ処理が不可欠な技術です。
今回のポイント
| ポイント | 説明 |
|---|---|
| 音速は変化する | 水温・塩分・水圧の3要因で音速が変わる。一定ではない。 |
| 距離は時間から計算 | d = v × t ÷ 2 のシンプルな式で水深を算出。 |
| マルチビームで3D化 | 扇状の複数ビームで広範囲の海底地形を立体的に取得。 |
| 補正が精度の鍵 | 水温補正・潮汐補正で、現場の誤差を取り除く。 |
もし海洋調査や測量に興味がある方は、ぜひ「マルチビーム測深」や「海底地形データ」にも触れてみてください。身近な技術の中に、物理の面白さが詰まっています。
参考文献
- UNESCO. “Algorithms for computation of fundamental properties of seawater”. 2021.
- NOAA. “Multibeam Sonar Theory of Operation”. 2022.
- Urick, R. J. “Principles of Underwater Sound”. 2021.
- 海上保安庁. “潮汐観測資料”. 2023.
水中調査・音響測深のご相談
AGSは音響測深をはじめとする水中調査技術のスペシャリストです。マルチビーム測量、海底地形調査、ダム堆砂調査など、お気軽にご相談ください。
© 2026 株式会社アーク・ジオ・サポート All Rights Reserved.